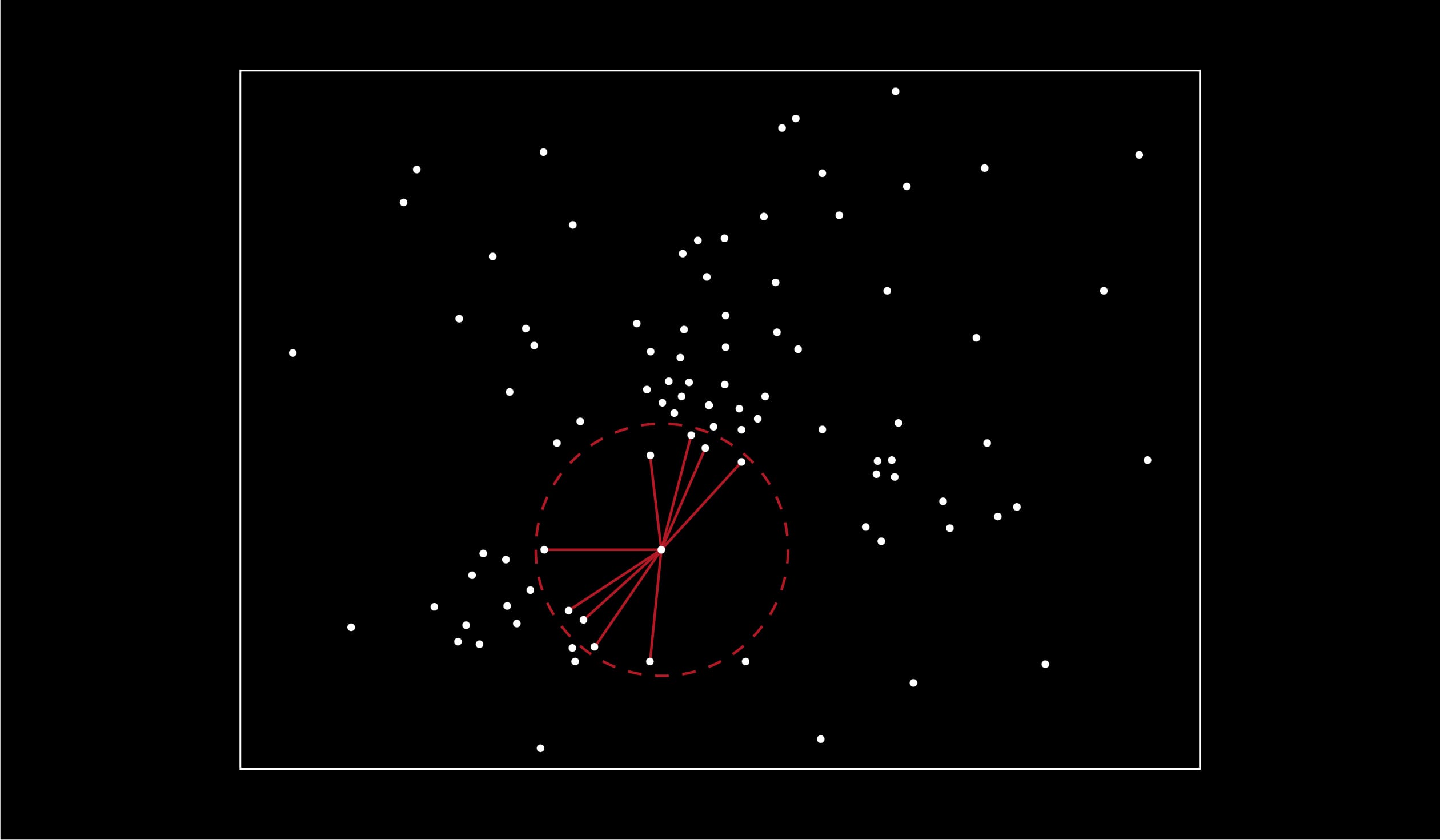
Plus proches voisins approchés (AKNN) : cibler la recherche.
L’idée est très simple : au lieu de fouiller l’ensemble de l’espace des éléments candidats, nous n’en fouillons qu’une petite partie dans laquelle nous savons que l’élément cible se trouve. Cela implique que ces parties aient été déterminées au préalable, c’est-à-dire que notre espace ait été partitionné.
Principe du partitionnement
Le partitionnement consiste à morceler l’espace en de multiples sous-espaces. Reprenons notre graphique précédent et fragmentons l’espace :
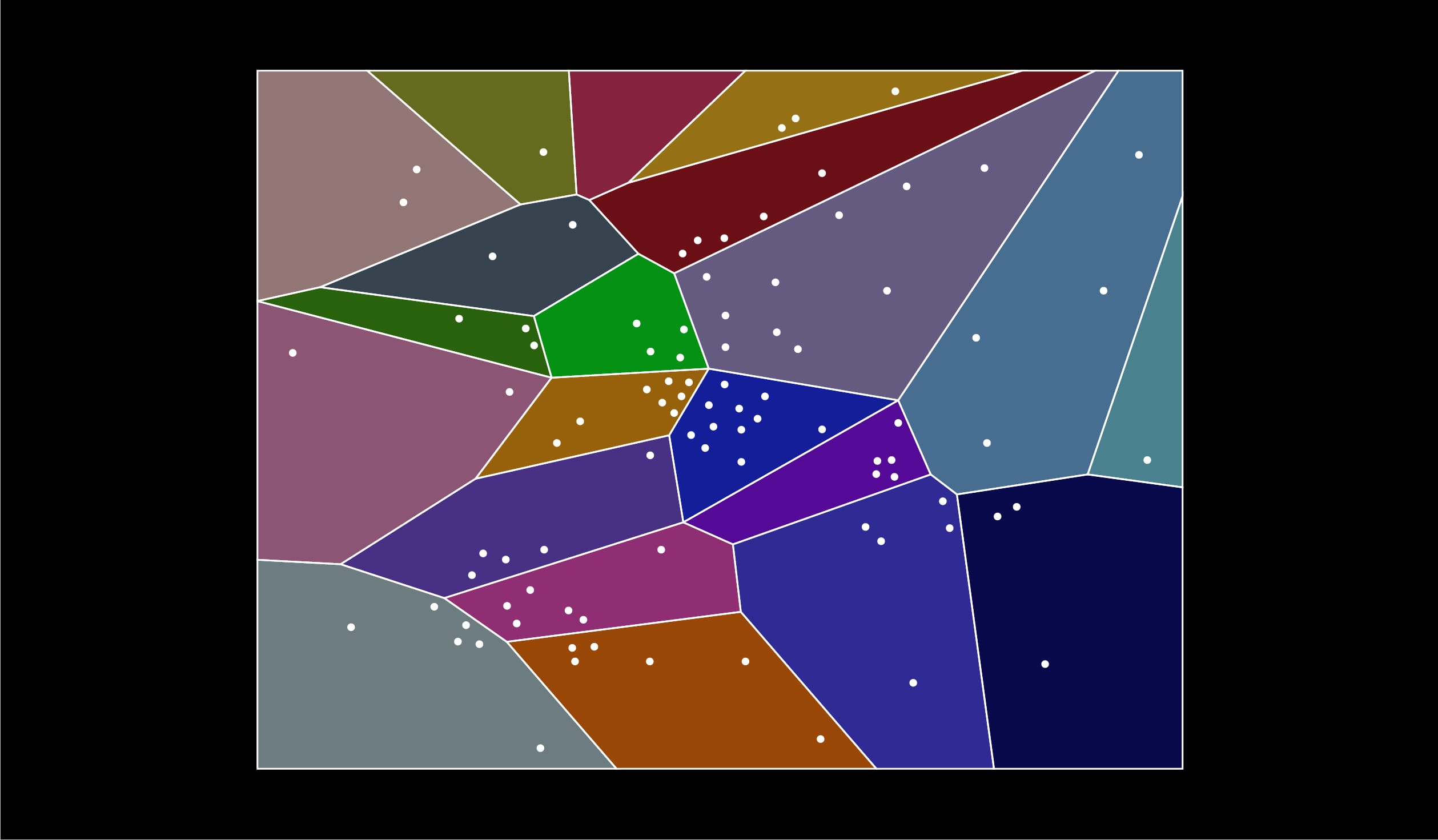
On recherche alors les plus proches voisins d’un élément uniquement dans un fragment ou que l’on appellera ici “cluster” :
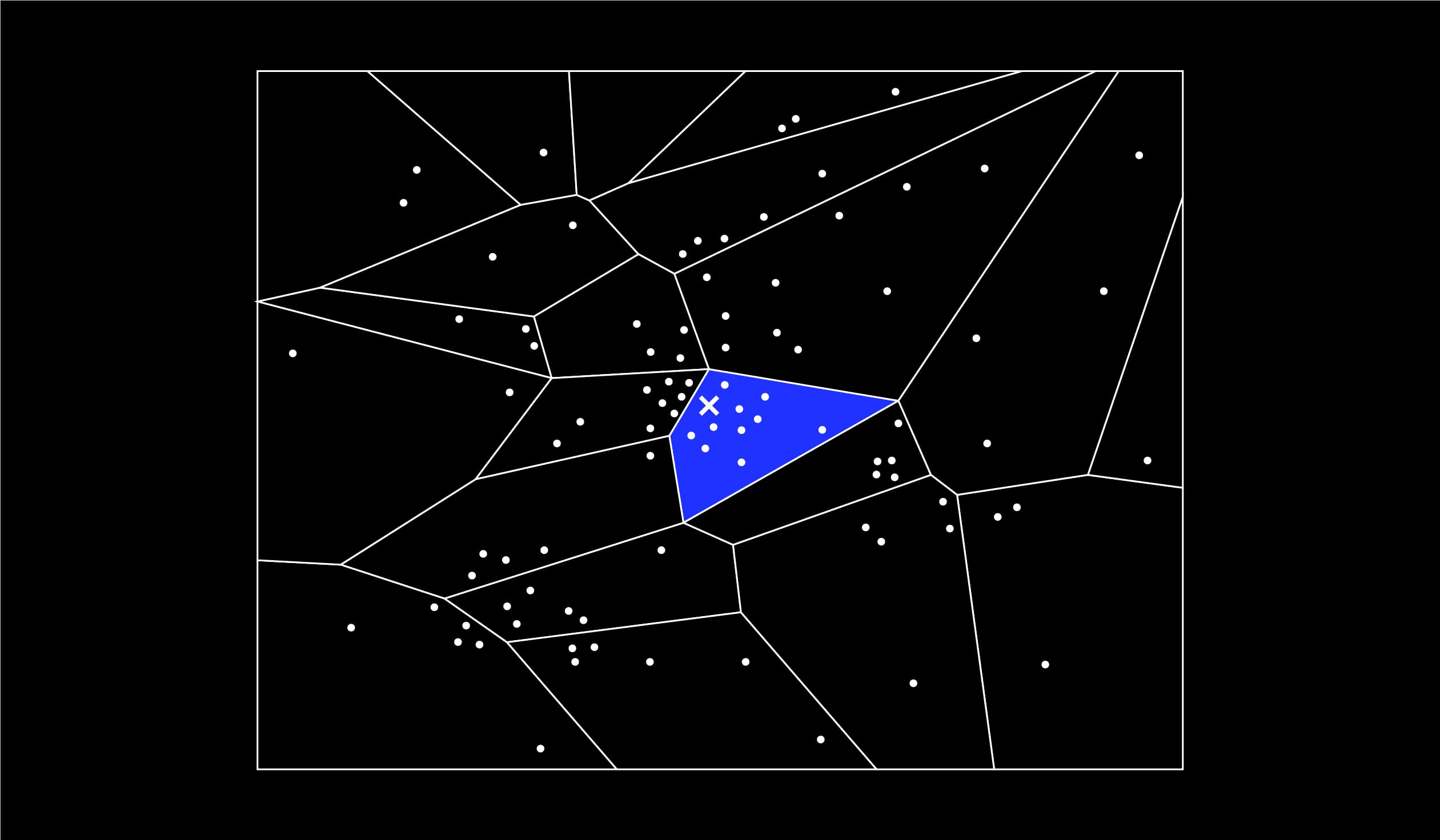
Clusters adjacents et file de priorité
Mais que faire si le cluster dans lequel je vais fouiller ne compte que six éléments alors que je souhaiterais faire émerger les dix plus proches voisins ? Et que faire si l’élément cible se trouve, par un malheureux hasard, près de la frontière du cluster et que ses plus proches voisins se trouvent en réalité … de l’autre côté de cette frontière ?
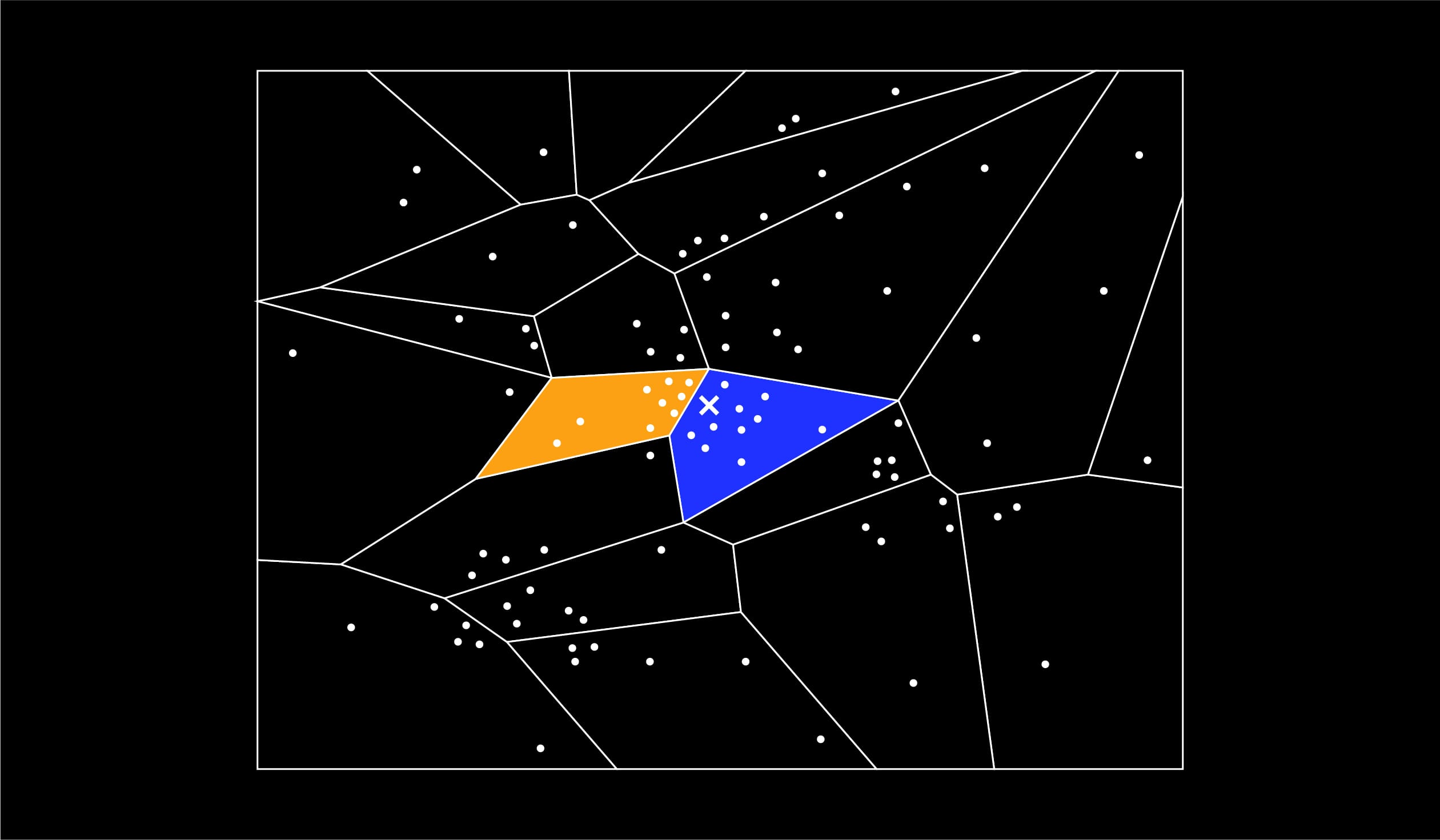
C’est évidemment un écueil que l’algorithme anticipe et qu’il permet d’éviter. Comment ?
Là aussi c’est assez simple, en allant fouiller les clusters adjacents, c’est-à-dire les clusters qui ont une frontière commune avec le cluster cible. Si l’on juge que ces clusters sont trop nombreux, on ne peut fouiller que les clusters qui partagent la frontière commune la plus proche du point cible. Et en pratique on va les fouiller selon un ordre défini par une “file de priorité” définie par la distance du centre de gravité de chaque cluster au point cible. “Mais alors on recalcule des distances alors qu’on voulait justement en calculer moins !” nous objecterez-vous à juste titre. Oui, c’est vrai, mais il vaut mieux calculer les distances à quelques centres de gravité plutôt qu’à des millions de points.
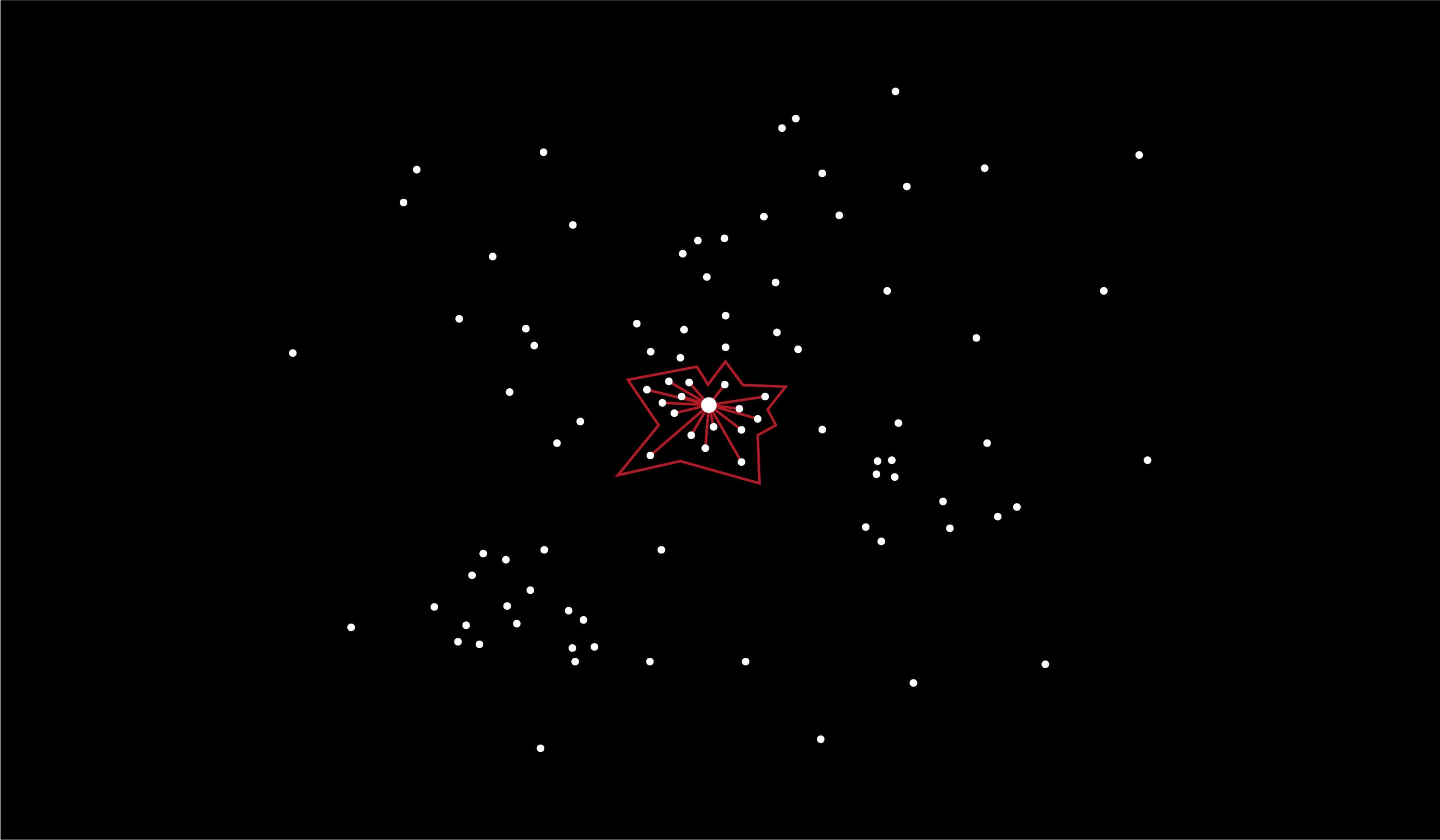
Forêt de partitionnements
On l’aura compris notre recherche est extrêmement dépendante de la manière dont on va partitionner l’espace. Alors pour se prémunir d’un partitionnement un peu fantaisiste, on va en combiner plusieurs. Les partitionnements pouvant, entre autres, être obtenus grâce à des arbres de décision (ce que nous aborderons ultérieurement), on appelle cela tout naturellement des forêts de partitionnements. On applique les principes de “clusters adjacents” et de “file de priorité“ pour chaque partitionnement, on opère une réunion des clusters obtenus et on obtient alors le polygone ci-dessous dans lequel on va appliquer l’algorithme des plus proches voisins.
Et voici comment on peut diviser grandement son nombre de distances à calculer et donc son temps d’exécution. Dans le cadre de la construction du moteur de recommandation de sociétés que nous avons effectué, cela nous a permis de faire baisser notre temps de requête d’environ 800 à 100 millisecondes. Un gain précieux quand on sait qu’au-delà de 150 ms d’attente, on considère que l’utilisateur ressent une gêne et va statistiquement finir par ne tout simplement plus utiliser le système.
Simple n’est-ce pas ?
Simple oui, sur le plan théorique. Mais sur le plan pratique, c’est beaucoup plus complexe. Les deux grandes questions étant : comment et surtout quand effectuer les partitionnements ?
“Entraîner” le partitionnement
Il existe de nombreuses façons de partitionner l’espace, mais, sans rentrer dans les détails, disons qu’il existe quatre grandes familles d’approches :
- basée sur les arbres aléatoires ;
- basée sur les graphes ;
- basée sur les fonctions de hachage ;
- basé sur des algorithmes de clustering.
“Seconde objection” seriez-vous en droit de nous dire, “n’est-il pas ubuesque, dans l’optique de simplifier nos calculs d’avoir recours à des méthodes complexes comme le clustering, le hashing ou la construction d’arbres aléatoires ?” Et bien nous répondrons cette fois que non, parce que ces tâches peuvent s’effectuer à d’autres moments que celui de la requête, quand le système est en repos, et donc ne pas impacter le confort de l’utilisateur. Par ailleurs, un seul entraînement va permettre d’effectuer autant de requêtes que l’on veut (jusqu’à ce qu’on décide de réentraîner parce que la base aura été mise à jour par exemple). Là, réside le secret et le succès des plus proches voisins approchés.
Un nouveau framework open-source hyper-puissant : Milvus.
Il existe de nombreuses implémentations de l’algorithme des plus proches voisins approchés, l’une des plus célèbres versions, par exemple, est appelée Annoy et repose sur les arbres aléatoires. À Kernix nous sommes familiers depuis quelques années déjà de ces implémentations, mais l’année passée nous avons commencé à travailler avec un framework dont la version 2.0, en cours de finalisation fin 2021, nous est apparue comme particulièrement convaincante : il s’agit de Milvus.
Totalement open-source et doté d’une communauté dynamique, Milvus propose de nombreux avantages :
- exhaustivité : Milvus encapsule de nombreuses bibliothèques de partitionnement (ou indexation), notamment Annoy ou NMSLIB, laissant ainsi la possibilité de s’adapter au mieux au contexte,
- universalité : Milvus fournit des kits de développement (SDK) en Python, Java, Go et C++,
- ergonomie : Milvus peut s’utiliser en quelques lignes de codes, est bien documenté et est pourvu d’un système de log qui permet de monitorer rigoureusement son fonctionnement,
- scalabilité : C’est un domaine dans lequel la version 2.0 apporte beaucoup d’amélioration. Par une attention accrue apportée à la séparation des fonctionnalités en microservices, Milvus a optimisé l’allocation des ressources pour un workflow exigeant, composé des tâches hétérogènes. Milvus 2.0 suit strictement les principes de séparation de stockage et de calcul, du contrôle et de la planification des tâches. Le système se subdivise en quatre briques : interface utilisateur, service de coordination, “worker nodes” et stockage.
Auparavant, nous maintenions en interne à Kernix des solutions de recherche de plus proches voisins. Le projet open source Milvus nous permet de nous affranchir de développements conséquents autour des algorithmes : l’association entre les entités indexées par l’algorithme de plus proches voisins et celles stockées dans les autres bases de données, la gestion du déploiement sur plusieurs instances le cas échéant, la mise à jour des éléments supprimés à répercuter dans l’index, la fréquence d’entraînement du modèle, la conception d’une même API pour les différentes méthodes de recherche et d’indexation, etc. Les efforts sont désormais mutualisés dans un projet open source.
Besoin d’une recommandation à haute scalabilité : essayez Milvus avec Kernix.
Les problématiques de recommandation sont indissociables de celles de passage à l’échelle. Les algorithmes des plus proches voisins approchés sont une des manières de répondre aux besoins de passage à l’échelle. Ils reposent sur des concepts simples, mais qui doivent être bien exécutés pour être efficaces. C’est la raison pour laquelle Kernix fait partie des “early adopters” de Milvus, et voit dans ce framework une solution agile, efficace et peu coûteuse dont nous espérons au plus vite faire bénéficier nos clients. Alors prêts à essayer Milvus ?